SourceFinder#
- class photutils.segmentation.SourceFinder(n_pixels, *, connectivity=8, deblend=True, n_levels=32, contrast=0.001, mode='exponential', relabel=True, n_processes=1, progress_bar=True)[source]#
Bases:
objectClass to detect sources, including deblending, in an image using segmentation.
This is a convenience class that combines the functionality of
detect_sourcesanddeblend_sources.Sources are deblended using a combination of multi-thresholding and watershed segmentation. In order to deblend sources, there must be a saddle between them.
- Parameters:
- n_pixelsint or array_like of 2 int
The minimum number of connected pixels, each greater than a specified threshold, that an object must have to be detected. If
n_pixelsis an integer, then the value will be used for both source detection and deblending (which internally uses source detection at multiple thresholds). Ifn_pixelscontains two values, then the first value will be used for source detection and the second value used for source deblending.n_pixelsvalues must be positive integers.- connectivity{4, 8}, optional
The type of pixel connectivity used in determining how pixels are grouped into a detected source. The options are 4 or 8 (default). 4-connected pixels touch along their edges. 8-connected pixels touch along their edges or corners.
- deblendbool, optional
Whether to deblend overlapping sources.
- n_levelsint, optional
The number of multi-thresholding levels to use for deblending. Each source will be re-thresholded at
n_levelslevels spaced exponentially or linearly (see themodekeyword) between its minimum and maximum values. This keyword is ignored unlessdeblend=True.- contrastfloat, optional
The fraction of the total source flux that a local peak must have (at any one of the multi-thresholds) to be deblended as a separate object.
contrastmust be between 0 and 1, inclusive. Ifcontrast=0then every local peak will be made a separate object (maximum deblending). Ifcontrast=1then no deblending will occur. The default is 0.001, which will deblend sources with a 7.5 magnitude difference. This keyword is ignored unlessdeblend=True.- mode{‘exponential’, ‘linear’, ‘sinh’}, optional
The mode used in defining the spacing between the multi-thresholding levels (see the
n_levelskeyword) during deblending. The'exponential'and'sinh'modes have more threshold levels near the source minimum and less near the source maximum. The'linear'mode evenly spaces the threshold levels between the source minimum and maximum. The'exponential'and'sinh'modes differ in that the'exponential'levels are dependent on the source maximum/minimum ratio (smaller ratios are more linear; larger ratios are more exponential), while the'sinh'levels are not. Also, the'exponential'mode will be changed to'linear'for sources with non-positive minimum data values. This keyword is ignored unlessdeblend=True.- relabelbool, optional
If
True(default), then the segmentation image will be relabeled after deblending such that the labels are in consecutive order starting from 1. This keyword is ignored unlessdeblend=True.- n_processesint, optional
The number of processes to use for source deblending. If set to 1, then a serial implementation is used instead of a parallel one. If
None, then the number of processes will be set to the number of CPUs detected on the machine. Please note that due to overheads, multiprocessing may be slower than serial processing if only a small number of sources are to be deblended. The benefits of multiprocessing require ~1000 or more sources to deblend, with larger gains as the number of sources increase. This keyword is ignored unlessdeblend=True.- progress_barbool, optional
Whether to display a progress bar. If
n_processes = 1, then the ID shown after the progress bar is the source label being deblended. If multiprocessing is used (n_processes > 1), the ID shown is the last source label that was deblended. The progress bar requires that the tqdm optional dependency be installed. This keyword is ignored unlessdeblend=True.
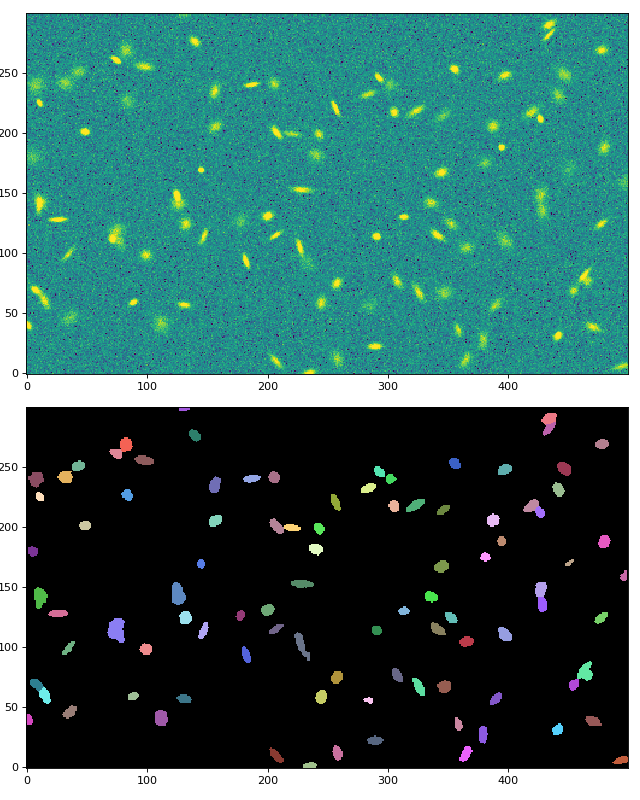
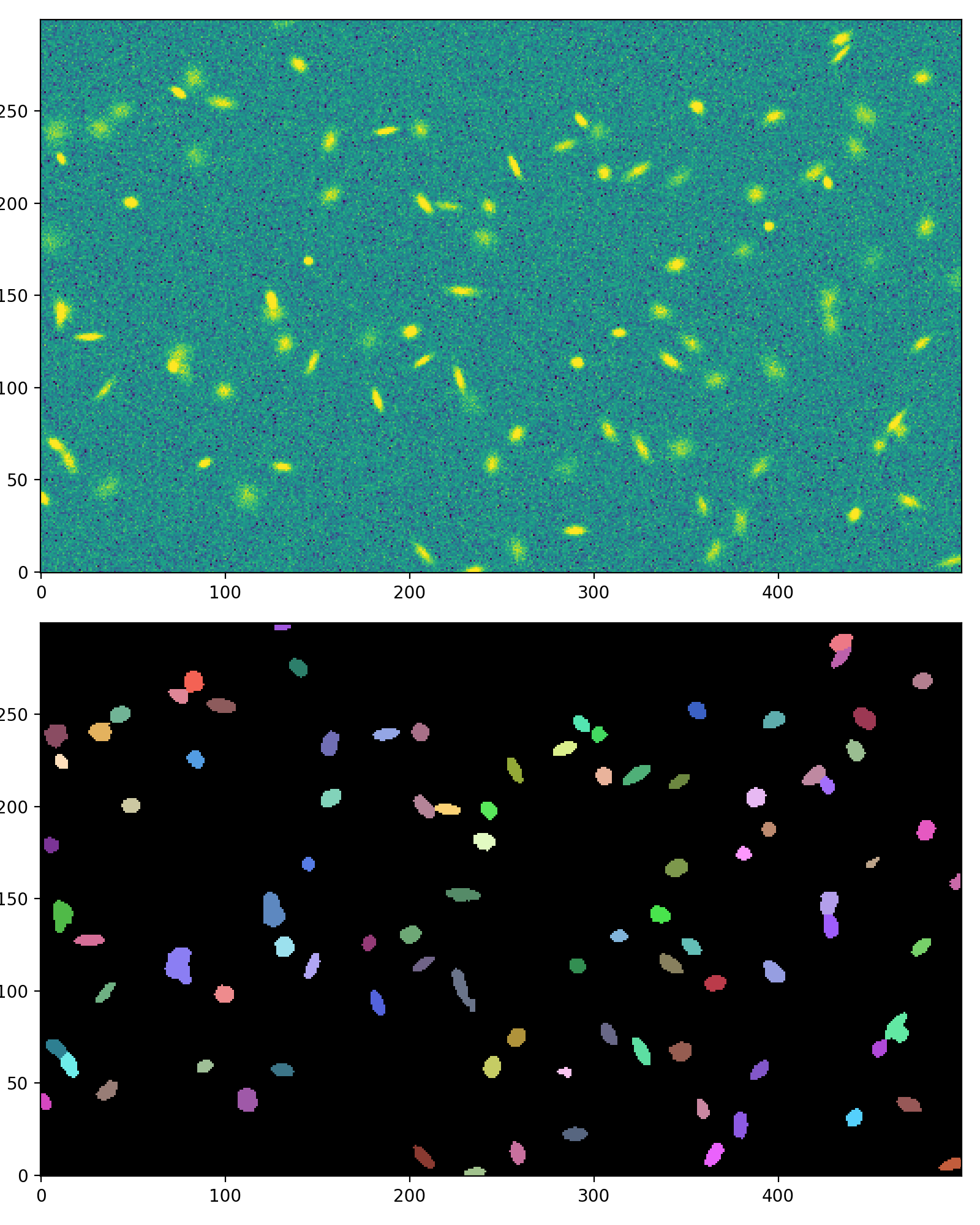
Examples
import matplotlib.pyplot as plt from astropy.convolution import convolve from astropy.visualization import simple_norm from photutils.background import Background2D, MedianBackground from photutils.datasets import make_100gaussians_image from photutils.segmentation import (SourceFinder, make_2dgaussian_kernel) # Make a simulated image data = make_100gaussians_image() # Estimate the background using Background2D and subtract it bkg_estimator = MedianBackground() bkg = Background2D(data, (50, 50), filter_size=(3, 3), bkg_estimator=bkg_estimator) data -= bkg.background # subtract the background # Convolve the data kernel = make_2dgaussian_kernel(3.0, size=5) convolved_data = convolve(data, kernel) # Detect the sources threshold = 1.5 * bkg.background_rms # per-pixel detection threshold finder = SourceFinder(n_pixels=10, progress_bar=False) segment_map = finder(convolved_data, threshold) # Plot the image and the segmentation image fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(8, 10)) norm = simple_norm(data, 'sqrt', percent=99.5) ax1.imshow(data, norm=norm, origin='lower') segment_map.imshow(ax=ax2) fig.tight_layout()
(
Source code,png,hires.png,pdf,svg)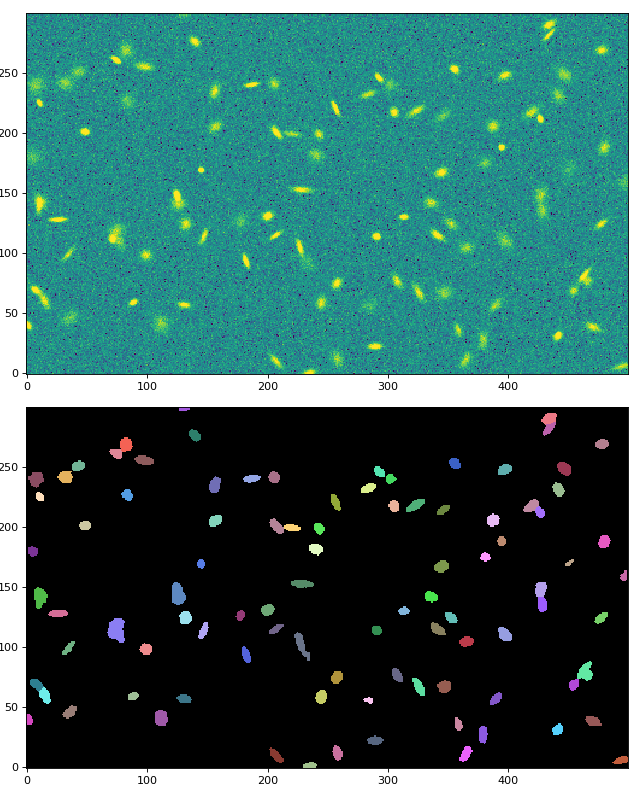
Methods Summary
__call__(data, threshold[, mask])Detect sources, including deblending, in an image using segmentation.
Methods Documentation
- __call__(data, threshold, mask=None)[source]#
Detect sources, including deblending, in an image using segmentation.
- Parameters:
- data2D
ndarray The 2D array from which to detect sources. Typically, this array should be an image that has been convolved with a smoothing kernel.
- threshold2D
ndarrayor float The data value or pixel-wise data values (as an array) to be used as the per-pixel detection threshold. If
datais aQuantityarray, thenthresholdmust have the same units asdata. A 2Dthresholdarray must have the same shape asdata.- mask2D bool
ndarray, optional A boolean mask with the same shape as
data, where aTruevalue indicates the corresponding element ofdatais masked. Masked pixels will not be included in any source.
- data2D
- Returns:
- segment_image
SegmentationImageorNone A 2D segmentation image, with the same shape as the input data, where sources are marked by different positive integer values. A value of zero is reserved for the background. If no sources are found then
Noneis returned.
- segment_image
{kind=link}
{kind=link}
{kind=link}