PSF Photometry (photutils.psf)¶
The photutils.psf subpackage contains tools for model-fitting
photometry, often called “PSF photometry”.
Terminology¶
Different astronomy subfields use the terms “PSF”, “PRF”, or related terms somewhat differently, especially when colloquial usage is taken into account. This package aims to be at the very least internally consistent, following the definitions described here.
We take the Point Spread Function (PSF), or instrumental Point Spread Function (iPSF) to be the infinite-resolution and infinite-signal-to-noise flux distribution from a point source on the detector, after passing through optics, dust, atmosphere, etc. By contrast, the function describing the responsivity variations across individual pixels is the Pixel Response Function (sometimes called “PRF”, but that acronym is not used here for reasons that will soon be apparent). The convolution of the PSF and pixel response function, when discretized onto the detector (i.e., a rectilinear CCD grid), is the effective PSF (ePSF) or Point Response Function (PRF) (this latter terminology is the definition used by Spitzer). In many cases the PSF/ePSF/PRF distinction is unimportant, and the ePSF/PRF are simply called the “PSF”, but the distinction can be critical when dealing carefully with undersampled data or detectors with significant intra-pixel sensitivity variations. For a more detailed description of this formalism, see Anderson & King 2000.
All this said, in colloquial usage “PSF photometry” sometimes refers
to the more general task of model-fitting photometry (with the effects
of the PSF either implicitly or explicitly included in the models),
regardless of exactly what kind of model is actually being fit. For
brevity (e.g., photutils.psf), we use “PSF photometry” in this way,
as a shorthand for the general approach.
PSF Photometry¶
Photutils provides a modular set of tools to perform PSF photometry for different science cases. The tools are implemented as classes that perform various subtasks of PSF photometry. High-level classes are also provided to connect these pieces together.
The two main PSF-photometry classes are PSFPhotometry
and IterativePSFPhotometry.
PSFPhotometry provides the framework for a flexible PSF
photometry workflow that can find sources in an image, optionally group
overlapping sources, fit the PSF model to the sources, and subtract the
fit PSF models from the image. IterativePSFPhotometry
is an iterative version of PSFPhotometry where
after the fit sources are subtracted, the process repeats until no
additional sources are detected or a maximum number of iterations has
been reached. When used with the DAOStarFinder,
IterativePSFPhotometry is essentially an implementation
of the DAOPHOT algorithm described by Stetson in his seminal paper for
crowded-field stellar photometry.
The star-finding step is controlled by the finder
keyword, where one inputs a callable function or class
instance. Typically, this would be one of the star-detection
classes implemented in the photutils.detection
subpackage, e.g., DAOStarFinder,
IRAFStarFinder, or
StarFinder.
After finding sources, one can optionally apply a clustering algorithm
to group overlapping sources using the grouper keyword. Usually,
groups are formed by a distance criterion, which is the case of the
grouping algorithm proposed by Stetson. Stars that grouped are fit
simultaneously. The reason behind the construction of groups and not
fitting all stars simultaneously is illustrated as follows: imagine
that one would like to fit 300 stars and the model for each star has
three parameters to be fitted. If one constructs a single model to fit
the 300 stars simultaneously, then the optimization algorithm will
have to search for the solution in a 900-dimensional space, which
is computationally expensive and error-prone. Having smaller groups
of stars effectively reduces the dimension of the parameter space,
which facilitates the optimization process. For more details see
Source Grouping Algorithms.
The local background around each source can optionally be subtracted
using the localbkg_estimator keyword. This keyword accepts a
LocalBackground instance that estimates the
local statistics in a circular annulus aperture centered on each source.
The size of the annulus and the statistic function can be configured in
LocalBackground.
The next step is to fit the sources and/or groups. This
task is performed using an astropy fitter, for example
LevMarLSQFitter, input via the fitter
keyword. The shape of the region to be fitted can be configured using
the fit_shape parameter. In general, fit_shape should be set
to a small size (e.g., (5, 5)) that covers the central star region
with the highest flux signal-to-noise. The initial positions are
derived from the finder algorithm. The initial flux values for the
fit are derived from measuring the flux in a circular aperture with
radius aperture_radius. The initial positions and fluxes can be
alternatively input in a table via the init_params keyword when
calling the class.
After sources are fitted, a model image of the fit
sources or a residual image can be generated using the
make_model_image() and
make_residual_image() methods,
respectively.
For IterativePSFPhotometry, the above steps can be
repeated until no additional sources are detected (or until a maximum
number of iterations).
The PSFPhotometry and
IterativePSFPhotometry classes provide the structure
in which the PSF-fitting steps described above are performed, but
all the stages can be turned on or off or replaced with different
implementations as the user desires. This makes the tools very flexible.
One can also bypass several of the steps by directly inputting to
init_params an astropy table containing the initial parameters for
the source centers, fluxes, group identifiers, and local backgrounds.
This is also useful if one is interested in fitting only one or a few
sources in an image.
Example Usage¶
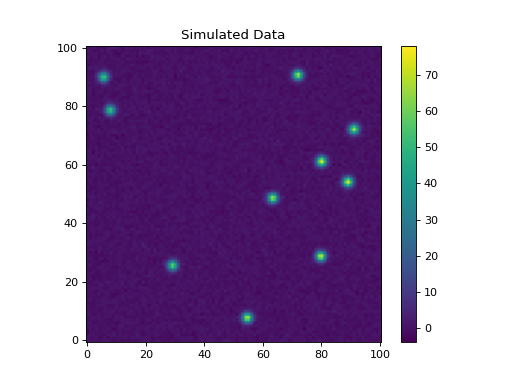
Let’s start with a simple example using simulated stars whose PSF is assumed to be Gaussian. We’ll create a synthetic image using tools provided by the photutils.datasets module:
>>> import numpy as np
>>> from photutils.datasets import make_test_psf_data, make_noise_image
>>> from photutils.psf import IntegratedGaussianPRF
>>> psf_model = IntegratedGaussianPRF(flux=1, sigma=2.7 / 2.35)
>>> psf_shape = (9, 9)
>>> nsources = 10
>>> shape = (101, 101)
>>> data, true_params = make_test_psf_data(shape, psf_model, psf_shape,
... nsources, flux_range=(500, 700),
... min_separation=10, seed=0)
>>> noise = make_noise_image(data.shape, mean=0, stddev=1, seed=0)
>>> data += noise
>>> error = np.abs(noise)
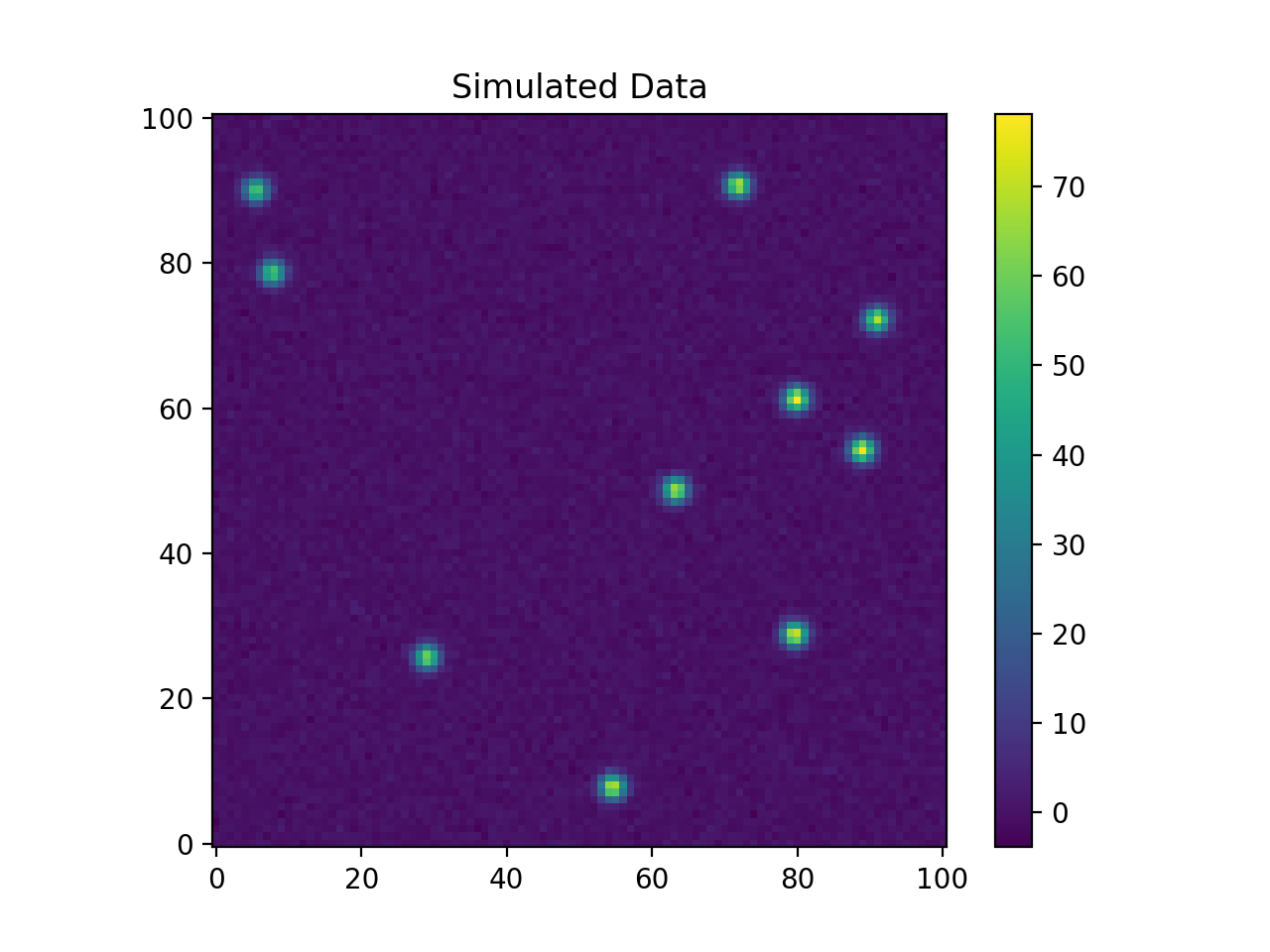
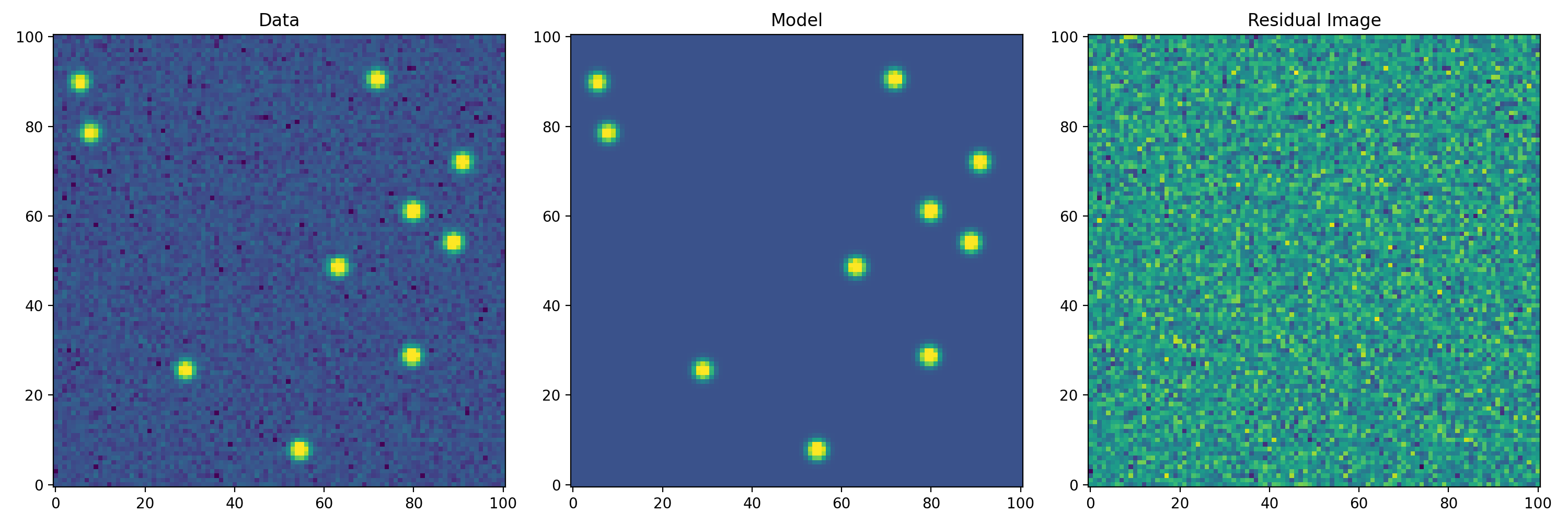
Let’s plot the image:
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
Fitting multiple stars¶
Now let’s use PSFPhotometry to perform PSF photometry
on the stars in this image. Note that the input image must be
background-subtracted prior to using the photometry classes. See
Background Estimation (photutils.background) for tools to subtract a global background from an
image. This is not needed for our synthetic image because it does not
include background.
We’ll use the DAOStarFinder class for
source detection. We’ll estimate the initial fluxes of each
source using a circular aperture with a radius 4 pixels. The
central 5x5 pixel region of each star will be fit using an
IntegratedGaussianPRF PSF model. First, let’s create an
instance of the PSFPhotometry class:
>>> from photutils.detection import DAOStarFinder
>>> from photutils.psf import PSFPhotometry
>>> psf_model = IntegratedGaussianPRF(flux=1, sigma=2.7 / 2.35)
>>> fit_shape = (5, 5)
>>> finder = DAOStarFinder(6.0, 2.0)
>>> psfphot = PSFPhotometry(psf_model, fit_shape, finder=finder,
... aperture_radius=4)
To perform the PSF fitting, we then call the class instance
on the data array, and optionally an error and mask array. A
NDData object holding the data, error, and mask arrays
can also be input into the data parameter. Note that all non-finite
(e.g., NaN or inf) data values are automatically masked. Here we input
the data and error arrays:
>>> phot = psfphot(data, error=error)
A table of initial PSF model parameter values can also be input when calling the class instance. An example of that is shown later.
Equivalently, one can input an NDData object with any
uncertainty object that can be converted to standard-deviation errors:
>>> from astropy.nddata import NDData, StdDevUncertainty
>>> uncertainty = StdDevUncertainty(error)
>>> nddata = NDData(data, uncertainty=uncertainty)
>>> phot2 = psfphot(nddata)
The result is an astropy Table with columns for the
source and group identification numbers, the x, y, and flux initial,
fit, and error values, local background, number of unmasked pixels
fit, the group size, quality-of-fit metrics, and flags. See the
PSFPhotometry documentation for descriptions of the
output columns.
The full table cannot be shown here as it has many columns, but let’s print the source ID along with the fit x, y, and flux values:
>>> phot['x_fit'].info.format = '.4f' # optional format
>>> phot['y_fit'].info.format = '.4f'
>>> phot['flux_fit'].info.format = '.4f'
>>> print(phot[('id', 'x_fit', 'y_fit', 'flux_fit')])
id x_fit y_fit flux_fit
--- ------- ------- --------
1 54.5641 7.7650 645.4552
2 29.0866 25.6111 553.0376
3 79.6285 28.7488 665.8715
4 63.2344 48.6406 626.7983
5 88.8849 54.1203 681.9908
6 79.8762 61.1380 686.3628
7 90.9606 72.0860 610.5911
8 7.8021 78.5730 509.3270
9 5.5349 89.8869 503.9691
10 71.8411 90.5841 621.1757
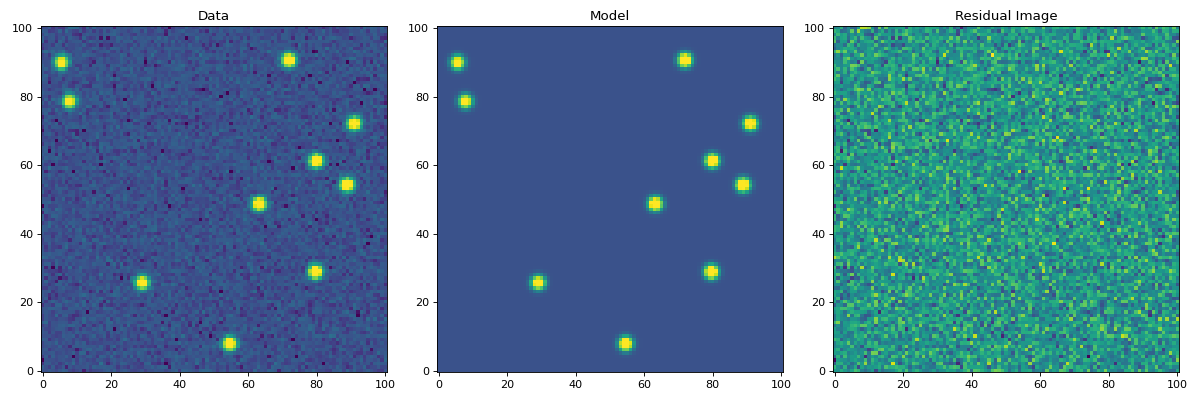
Let’s create the residual image:
>>> resid = psfphot.make_residual_image(data, (9, 9))
and plot it:
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
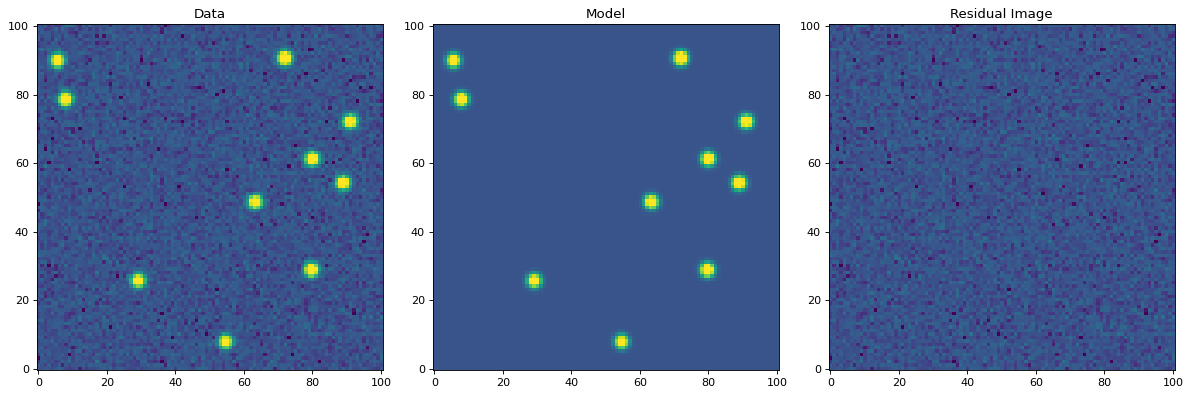
The residual image looks like noise, indicating good fits to the sources.
Further details about the PSF fitting can be obtained from attributes on
the PSFPhotometry instance. For example, the results
from the finder instance called during PSF fitting can be accessed
using the finder_results attribute (the finder returns an
astropy table):
>>> psfphot.finder_results['xcentroid'].info.format = '.4f' # optional format
>>> psfphot.finder_results['ycentroid'].info.format = '.4f' # optional format
>>> psfphot.finder_results['sharpness'].info.format = '.4f' # optional format
>>> psfphot.finder_results['peak'].info.format = '.4f'
>>> psfphot.finder_results['flux'].info.format = '.4f'
>>> psfphot.finder_results['mag'].info.format = '.4f'
>>> print(psfphot.finder_results)
id xcentroid ycentroid sharpness ... sky peak flux mag
--- --------- --------- --------- ... --- ------- ------- -------
1 54.5300 7.7508 0.5996 ... 0.0 67.0314 8.7012 -2.3490
2 29.0926 25.5993 0.5952 ... 0.0 58.7504 7.7484 -2.2230
3 79.6189 28.7515 0.5956 ... 0.0 70.4621 9.2351 -2.4136
4 63.2472 48.6151 0.5817 ... 0.0 64.9101 8.5701 -2.3325
5 88.8827 54.1299 0.5954 ... 0.0 75.8880 10.3243 -2.5347
6 79.8730 61.1214 0.6204 ... 0.0 78.0913 10.3346 -2.5357
7 90.9621 72.0802 0.6162 ... 0.0 69.1417 9.2325 -2.4133
8 7.7917 78.5454 0.5971 ... 0.0 52.7325 6.6840 -2.0626
9 5.5845 89.8645 0.5721 ... 0.0 50.5544 6.5387 -2.0387
10 71.8284 90.5625 0.6038 ... 0.0 65.7975 8.5373 -2.3283
The fit_results attribute contains a dictionary with a wealth of
detailed information, including the fit models and any information
returned from the fitter for each source:
>>> psfphot.fit_results.keys()
dict_keys(['local_bkg', 'init_params', 'fit_infos', 'fit_param_errs', 'fit_error_indices', 'npixfit', 'nmodels', 'psfcenter_indices', 'fit_residuals'])
As an example, let’s print the covariance matrix of the fit parameters for the first source (note that not all astropy fitters will return a covariance matrix):
>>> psfphot.fit_results['fit_infos'][0]['param_cov']
array([[ 7.27034774e-01, 8.86845334e-04, 3.98593038e-03],
[ 8.86845334e-04, 2.92871525e-06, -6.36805464e-07],
[ 3.98593038e-03, -6.36805464e-07, 4.29520185e-05]])
Fitting a single source¶
In some cases, one may want to fit only a single source (or few sources)
in an image. We can do that by defining a table of the sources that
we want to fit. For this example, let’s fit the single star at (x,
y) = (42, 36). We first define a table with this position and then
pass that table into the init_params keyword when calling the PSF
photometry class on the data:
>>> from astropy.table import QTable
>>> init_params = QTable()
>>> init_params['x'] = [63]
>>> init_params['y'] = [49]
>>> phot = psfphot(data, error=error, init_params=init_params)
The PSF photometry class allows for flexible input column names
using a heuristic to identify the x, y, and flux columns. See
PSFPhotometry for more details.
The output table contains only the fit results for the input source:
>>> phot['x_fit'].info.format = '.4f' # optional format
>>> phot['y_fit'].info.format = '.4f'
>>> phot['flux_fit'].info.format = '.4f'
>>> print(phot[('id', 'x_fit', 'y_fit', 'flux_fit')])
id x_fit y_fit flux_fit
--- ------- ------- --------
1 63.2344 48.6406 626.7983
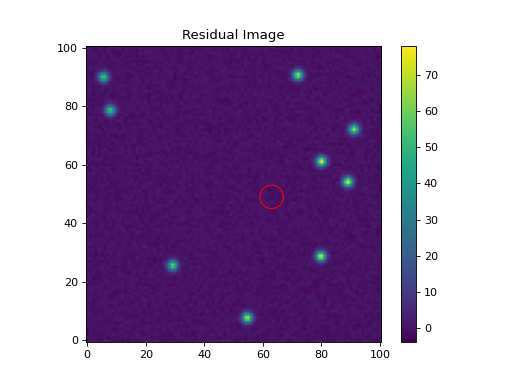
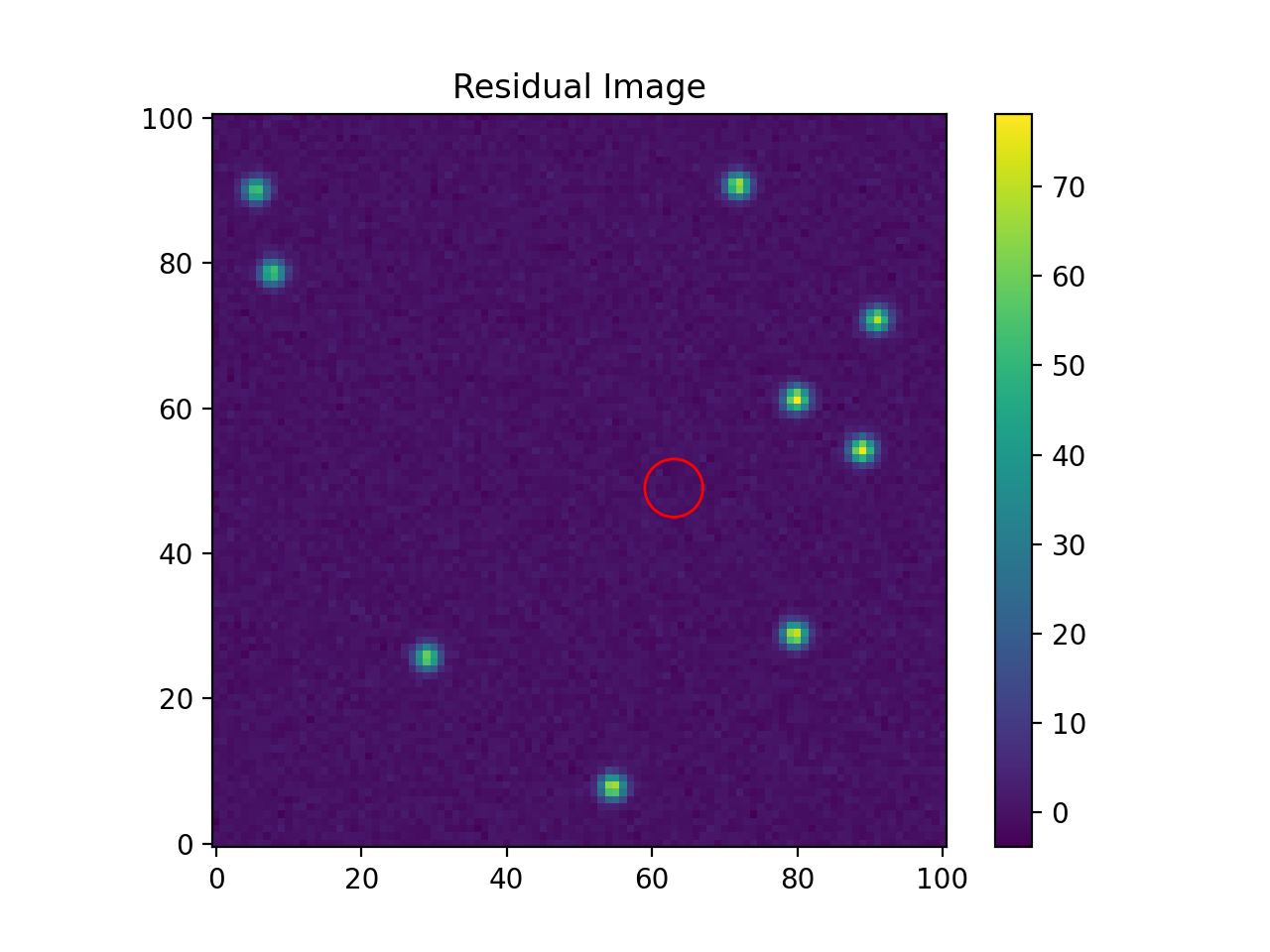
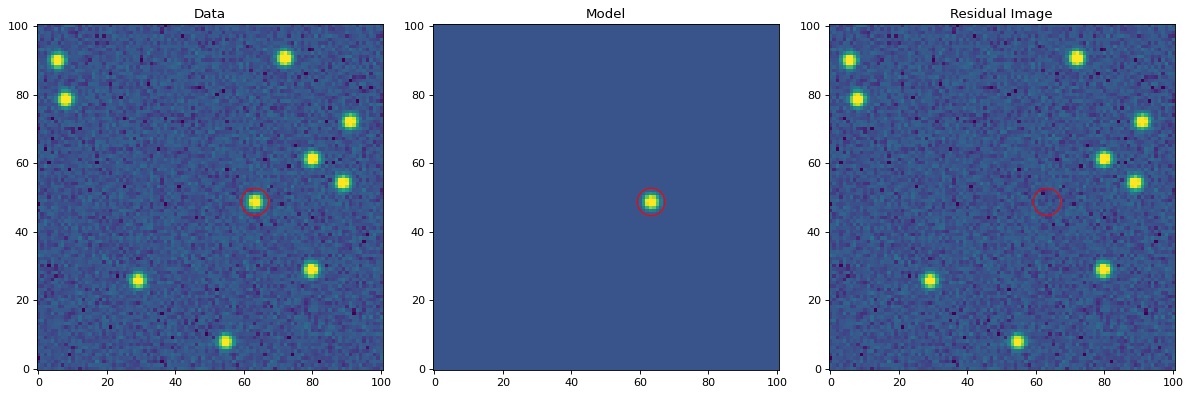
Finally, let’s show the residual image. The red circular aperture shows the location of the star that was fit and subtracted.
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
Forced Photometry¶
In general, the three parameters fit for each source are the x and y positions and the flux. However, the astropy modeling and fitting framework allows any of these parameters to be fixed during the fitting.
Let’s say you want to fix the (x, y) position for each source. You can
do that by setting the fixed attribute on the model parameters:
>>> psf_model2 = IntegratedGaussianPRF(flux=1, sigma=2.7 / 2.35)
>>> psf_model2.x_0.fixed = True
>>> psf_model2.y_0.fixed = True
>>> psf_model2.fixed
{'flux': False, 'x_0': True, 'y_0': True, 'sigma': True}
Now when the model is fit, the flux will be varied but, the (x, y)
position will be fixed at its initial position for every source. Let’s
just fit a single source (defined in init_params):
>>> psfphot = PSFPhotometry(psf_model2, fit_shape, finder=finder,
... aperture_radius=4)
>>> phot = psfphot(data, error=error, init_params=init_params)
The output table shows that the (x, y) position was unchanged, with the fit values being identical to the initial values. However, the flux was fit:
>>> phot['flux_init'].info.format = '.4f' # optional format
>>> phot['flux_fit'].info.format = '.4f'
>>> print(phot[('id', 'x_init', 'y_init', 'flux_init', 'x_fit',
... 'y_fit', 'flux_fit')])
id x_init y_init flux_init x_fit y_fit flux_fit
--- ------ ------ --------- ----- ----- --------
1 63 49 619.5049 63.0 49.0 556.8463
Source Grouping¶
Source grouping is an optional feature. To turn it on, create a
SourceGrouper instance and input it via the grouper
keyword. Here we’ll group stars that are within 20 pixels of each
other:
>>> from photutils.psf import SourceGrouper
>>> grouper = SourceGrouper(min_separation=20)
>>> psfphot = PSFPhotometry(psf_model, fit_shape, finder=finder,
... grouper=grouper, aperture_radius=4)
>>> phot = psfphot(data, error=error)
The group_id column shows that six groups were identified (each with
two stars). The stars in each group were simultaneously fit.
>>> print(phot[('id', 'group_id', 'group_size')])
id group_id group_size
--- -------- ----------
1 1 1
2 2 1
3 3 1
4 4 1
5 5 3
6 5 3
7 5 3
8 6 2
9 6 2
10 7 1
Care should be taken in defining the star groups. As noted above, simultaneously fitting very large star groups is computationally expensive and error-prone. A warning will be raised if the number of sources in a group exceeds 25.
Local Background Subtraction¶
To subtract a local background from each source, define a
LocalBackground instance and input it via
the localbkg_estimator keyword. Here we’ll use an annulus with
an inner and outer radius of 5 and 10 pixels, respectively, with the
MMMBackground statistic (with its default sigma
clipping):
>>> from photutils.background import LocalBackground, MMMBackground
>>> bkgstat = MMMBackground()
>>> localbkg_estimator = LocalBackground(5, 10, bkgstat)
>>> finder = DAOStarFinder(10.0, 2.0)
>>> psfphot = PSFPhotometry(psf_model, fit_shape, finder=finder,
... grouper=grouper, aperture_radius=4,
... localbkg_estimator=localbkg_estimator)
>>> phot = psfphot(data, error=error)
The local background values are output in the table:
>>> phot['local_bkg'].info.format = '.4f' # optional format
>>> print(phot[('id', 'local_bkg')])
id local_bkg
--- ---------
1 -0.0840
2 0.1784
3 0.2593
4 -0.0455
5 0.3212
6 -0.0836
7 -0.1130
8 -0.2482
9 0.0315
10 0.3926
The local background values can also be input directly using the
init_params keyword.
Iterative PSF Photometry¶
Now let’s use the IterativePSFPhotometry class to
iteratively fit the stars in the image. This class is useful for crowded
fields where faint stars are very close to bright stars. The faint stars
may not be detected until after the bright stars are subtracted.
For this simple example, let’s input a table of three stars for the
first fit iteration. Subsequent iterations will use the finder to
find additional stars:
>>> from photutils.background import LocalBackground, MMMBackground
>>> from photutils.psf import IterativePSFPhotometry
>>> fit_shape = (5, 5)
>>> finder = DAOStarFinder(10.0, 2.0)
>>> bkgstat = MMMBackground()
>>> localbkg_estimator = LocalBackground(5, 10, bkgstat)
>>> init_params = QTable()
>>> init_params['x'] = [54, 29, 80]
>>> init_params['y'] = [8, 26, 29]
>>> psfphot2 = IterativePSFPhotometry(psf_model, fit_shape, finder=finder,
... localbkg_estimator=localbkg_estimator,
... aperture_radius=4)
>>> phot = psfphot2(data, error=error, init_params=init_params)
The table output from IterativePSFPhotometry contains a
column called iter_detected that returns the fit iteration in which
the source was detected:
>>> phot['x_fit'].info.format = '.4f' # optional format
>>> phot['y_fit'].info.format = '.4f'
>>> phot['flux_fit'].info.format = '.4f'
>>> print(phot[('id', 'iter_detected', 'x_fit', 'y_fit', 'flux_fit')])
id iter_detected x_fit y_fit flux_fit
--- ------------- ------- ------- --------
1 1 54.5646 7.7648 645.7164
2 1 29.0884 25.6093 550.5295
3 1 79.6278 28.7481 660.1429
4 2 63.2344 48.6411 627.4414
5 2 88.8859 54.1203 676.3059
6 2 79.8764 61.1359 688.1962
7 2 90.9631 72.0879 612.4822
8 2 7.8259 78.5856 516.4237
9 2 5.5348 89.8868 503.4775
10 2 71.8491 90.5828 616.2827
References¶
Reference/API¶
This subpackage contains tools to perform point-spread-function (PSF) photometry.
Functions¶
|
Extract cutout images centered on stars defined in the input catalog(s). |
|
Generate a |
|
Generate a |
|
Make a PSF model that can be used with the PSF photometry classes ( |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.9.0. |
|
Create a GriddedPSFModel from a list of EPSFModels. |
Classes¶
|
Class to fit an ePSF model to one or more stars. |
|
Class to build an effective PSF (ePSF). |
|
A class to hold a 2D cutout image and associated metadata of a star used to build an ePSF. |
|
Class to hold a list of |
|
A class to hold a list of |
|
A fittable 2D model containing a grid ePSF models. |
Mixin class to plot a grid of ePSF models. |
|
|
Class to read and plot "STDPSF" format ePSF model grids. |
|
Class to group sources into clusters based on a minimum separation distance. |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.11.0. |
|
A fittable 2D model of an image allowing for image intensity scaling and image translations. |
|
A class that models an effective PSF (ePSF). |
|
Circular Gaussian model integrated over pixels. |
|
A model that adapts a supplied PSF model to act as a PRF. |
|
Class to perform PSF photometry. |
|
Class to iteratively perform PSF photometry. |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.9.0. |
|
Deprecated since version 1.9.0. |